GDM-OPT stands for Ground Deformation Monitoring with OPtical image Time-series. The service is developed and maintained by CNRS/EOST (Strasbourg) with contribution of IGN/Matis (Marne-la-Vallée) and CNRS/IPGP (Paris). The service allows the processing of optical image pairs for the monitoring of Earth surface deformation.
GDM-OPT-ETQ stands for Earthquake-triggered crustal deformation. It is designed for quantifiying co-seismic deformation along faults triggered by large magnitude earthquakes. It enables the on-demand processing of Sentinel-2 image time series. It provides 1) a module for image matching of multiple image pairs susing pixel and sub-pixel image correlation or optical flow, 2) a module for image pairs geometrical correction and filtering, and 3) a module for the spatio-temporal analysis of surface motion. It builds on the MicMac (IGN/Matis; Rosu et al., 2015 [1]), GeFolki (ONERA; Brigot et al., 2016 [2]), CO-REGIS (CNRS/EOST; Stumpf et al., 2017 [3]), MPIC (Stumpf et al., 2018 [4]) and FMask (Texas Tech University; Qiu et al., 2019 [5]) algorithms. The service is designed for the processing of a maximum of 4 Sentinel-2 images with 2 images before the earthquake (pre-event) and 2 images after the event (post-event). It is an on-demand service tailored for quantifying co-seismic deformation from a limited number of images and a few number of parameters which makes it easy to use by non-experts.
EO sources:
- Sentinel-2 MSI L1C
Outputs
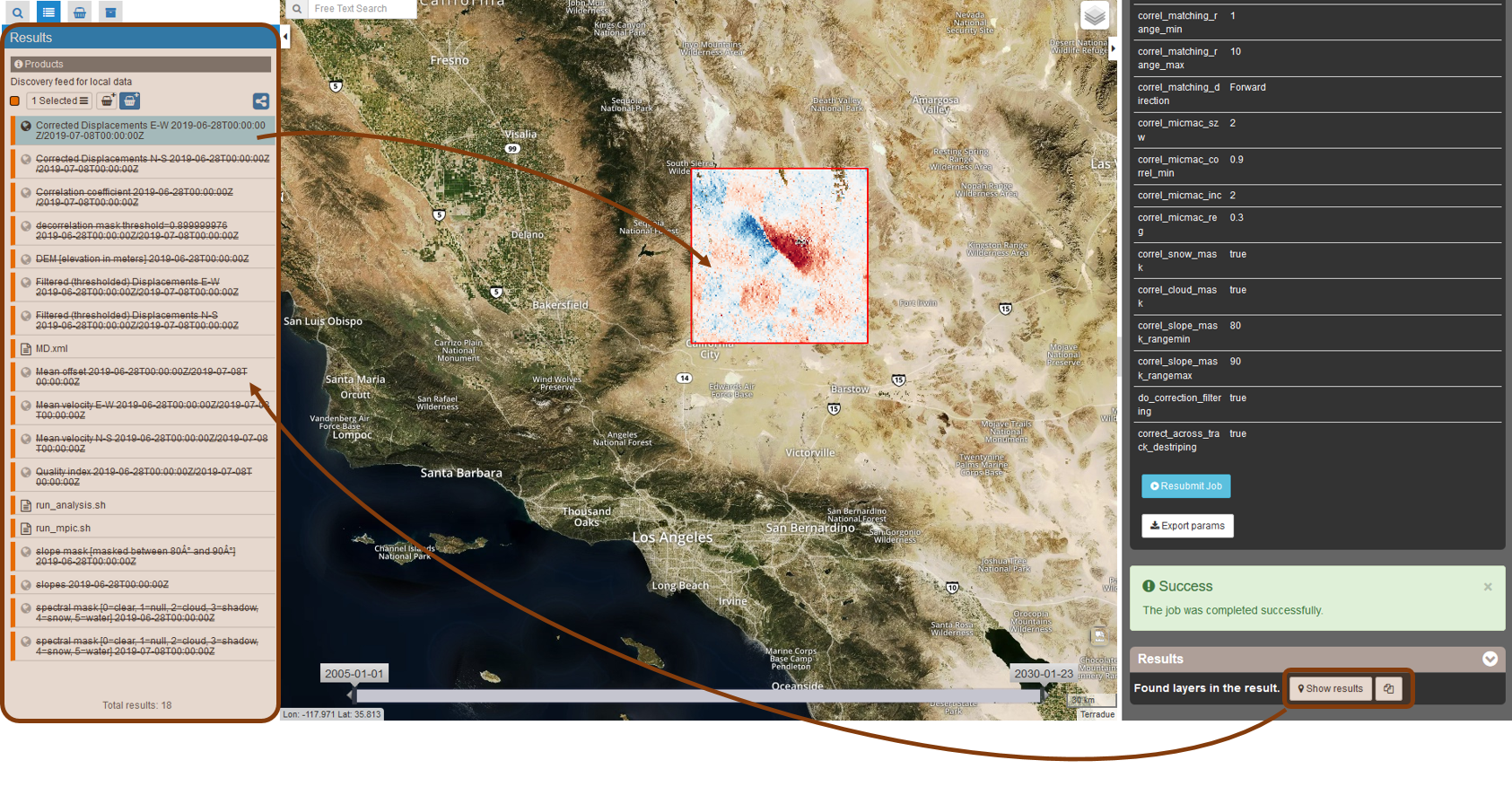
Four service outputs are provided for visualization on GEP:
Four service output folders are provided for download by the user:
The tutorial introduces the use of the GDM-OPT-ETQ service for the quantification of co-seismic motion. To this end we will process Sentinel-2 images acquired before and after the Ridgecrest earthquake sequence (California, USA, 2019).

This will display the service panel including several tunable parameters.

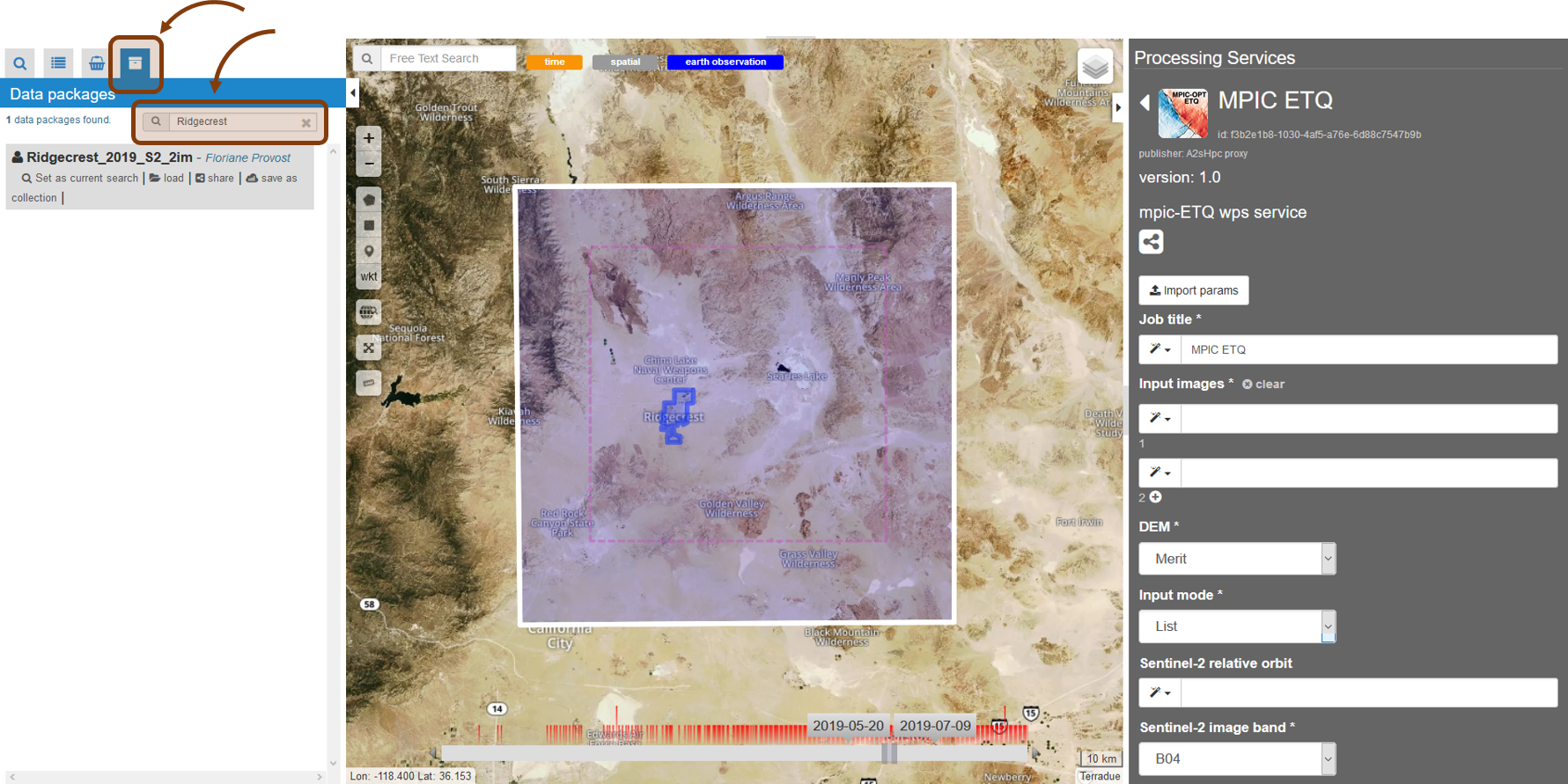
The Geobrowser offers multiple ways to search a large variety of EO-based dataset and the user should refer to the Geobrowser section for a general introduction. For this tutorial we will use a data package which is accessible through the “Data Packages” tab on the upper left of the screen. If you type “Ridgecrest” into the search box you should be able to find a data package named “Ridgecrest_2019_S2_2im”. Alternatively you can access the `Ridgecrest data package`_ directly by clicking on the link: .. Ridgecrest datapackage: https://geohazards-tep.eu/t2api/share?url=https%3A%2F%2Fgeohazards-tep.eu%2Ft2api%2Fdata%2Fpackage%2Fsearch%3Fid%3DRidgecrest_2019_S2_2im
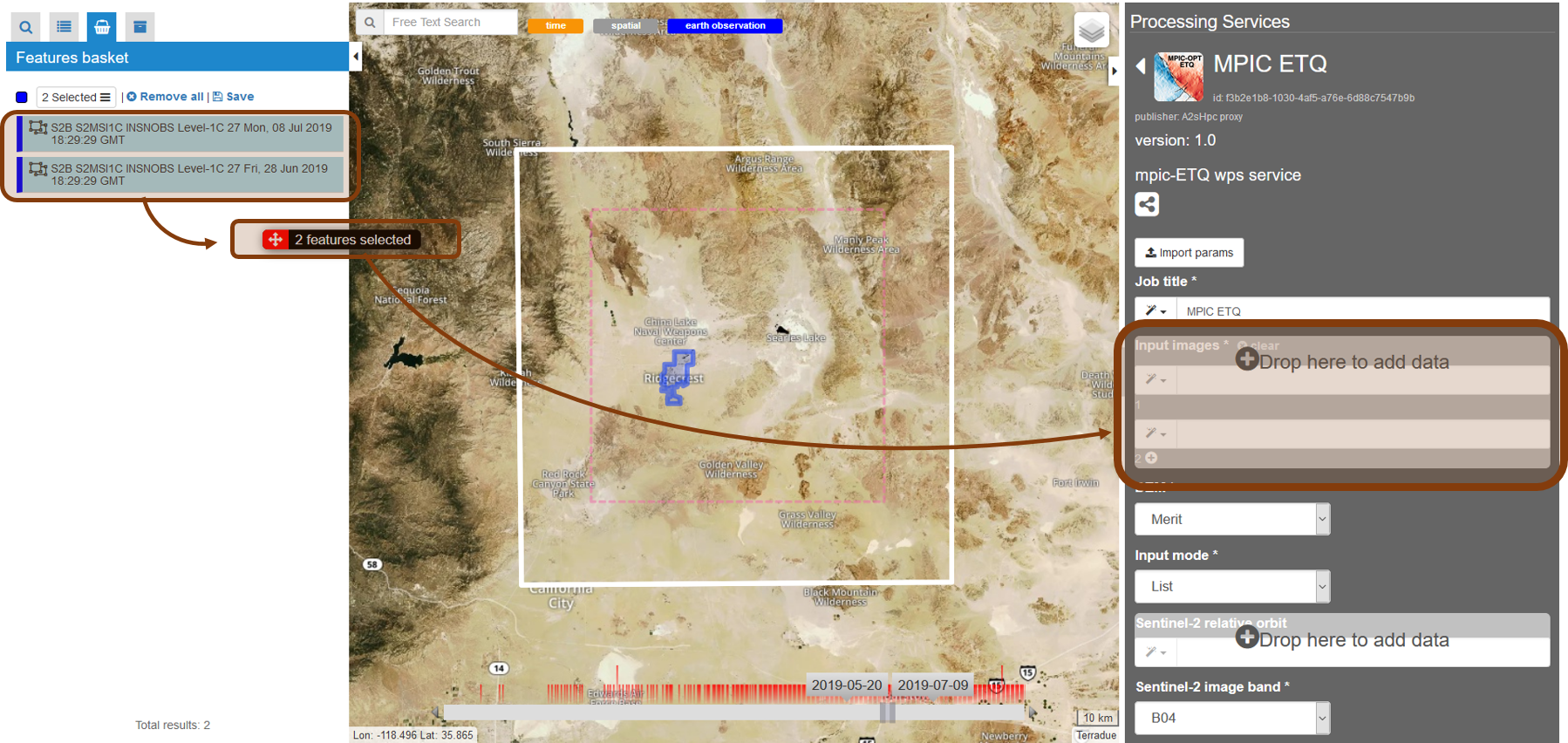
Click on the data package, hold Shift and Drag and Drop all four products in the Sentinel-2 products field in the service panel on the right:
Warning
Sentinel-2 datasets distributed before 27 September 2016 contain multiple tiles. For such datasets the Geobrowser currently returns several results including both the original multi-tile dataset and a preview of the footprints of the tiles. For processing, you must select only the original multi-tile datasets. For datasets after 27 September 2016, there is no such ambiguity.
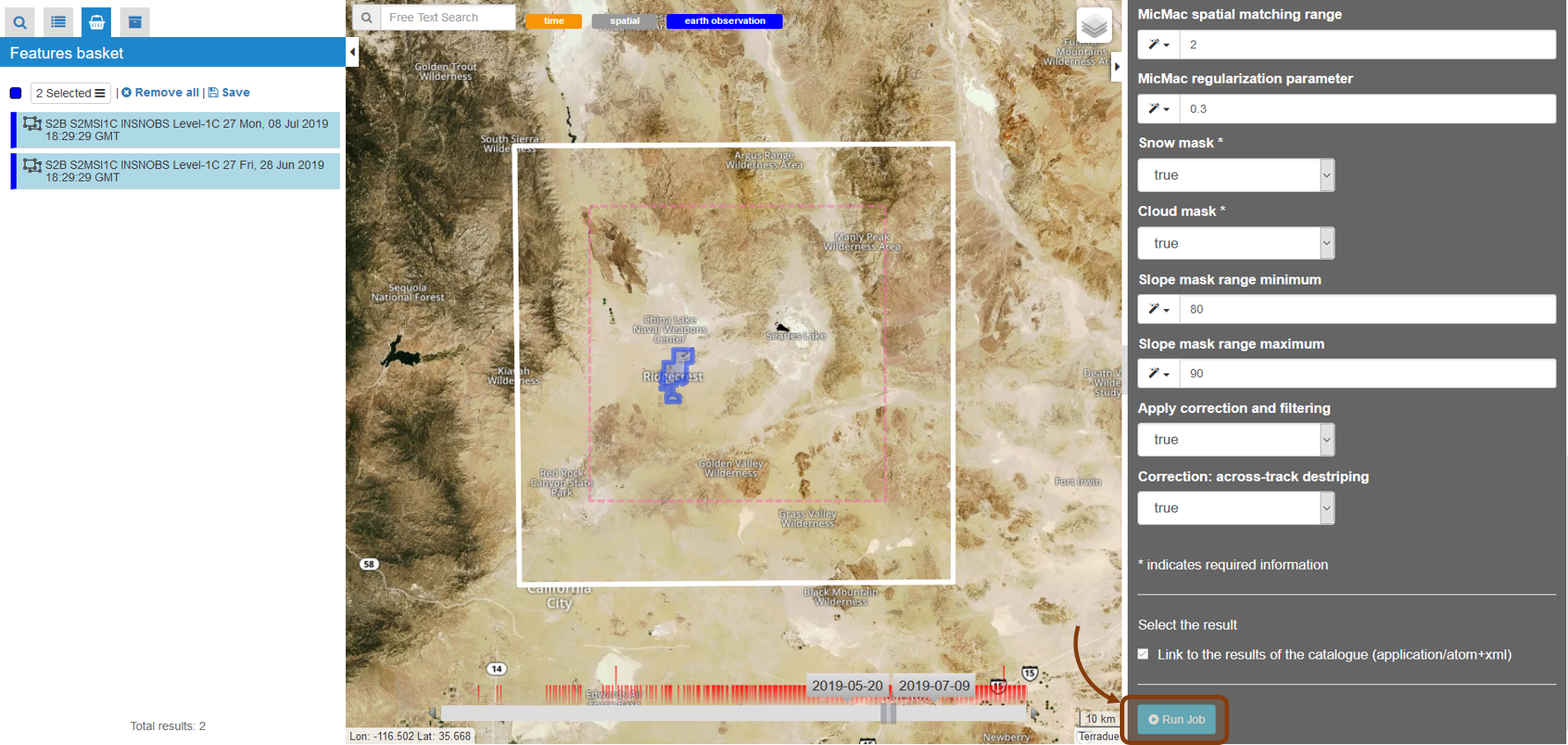
There are 16 processing parameters that can be adjusted. A short explanation of the parameter is provided when hovering over the parameter fields.
Warning
Choosing the Forward+Backward option has to be carefully considered by the user as it increases the number of pairs created and hence, the computing time and resources.
Note
The products in the Geobrowser are previews. The user needs to download the results for further analysis and interpretation.
The GDM-OPT services are scientific softwares provided at the best CNRS/ForM@Ter (EOST/A2S) knowledge according to state-of-the-art image matching algorithms. No warranty is provided on the processors and results of the services. CNRS/ForM@Ter (EOST/A2S) is not responsible for any software inaccuracies, bugs, errors and misuse. Generated results have a defined accuracy according to the relevant scientific publications available in the literature. Result accuracy is estimated on a statistical basis. Provided results are not validated by CNRS/ForM@Ter and, indeed, it is user responsibility to validate them. CNRS/ForM@Ter is not responsible for the use, quality, accuracy and interpretation of results and products that are generated by using the processors and services provided within the platform. CNRS/ForM@Ter is not responsible for the use, quality, accuracy and interpretation of third party results, products and services derived from the use of the processors and services. CNRS/ForM@Ter is not responsible of possible outages of the provided services. CNRS/ForM@Ter is not responsible of any kind of third party loss derived from service outage, result inaccuracies, software errors of the provided services and products. The maintenance, update and user support are provided by EOST/A2S free of charge and at best effort. EOST/A2S is not responsible for any consequence derived from delays on replies to user requests or support inaccuracies.
| [1] | Rosu, A. M., Pierrot-Deseilligny, M., Delorme, A., Binet, R., & Klinger, Y. (2015). Measurement of ground displacement from optical satellite image correlation using the free open-source software MicMac. ISPRS Journal of Photogrammetry and Remote Sensing, 100, 48-59. |
| [2] | Brigot, G., Colin-Koeniguer, E., Plyer, A., & Janez, F. (2016). Adaptation and evaluation of an optical flow method applied to coregistration of forest remote sensing images. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 9(7), 2923-2939. |
| [3] | Stumpf, A., Malet, J.-P. and Delacourt, C. (2017). Correlation of satellite image time-series for the detection and monitoring of slow-moving landslides. Remote Sensing of Environment, 189: 40-55. DOI:10.1016/j.rse.2016.11.007 |
| [4] | Stumpf, A., Michéa, D. Malet, J.-P. (2018). Improved co-registration of Sentinel-2 and Landsat-8 imagery for Earth surface motion measurements. Remote Sensing, 10, 160. DOI:10.3390/rs10020160 |
| [5] | Qiu, S., Zhu, Z., & He, B. (2019). Fmask 4.0: Improved cloud and cloud shadow detection in Landsats 4–8 and Sentinel-2 imagery. Remote sensing of environment, 231, 111205. |
| [6] | Yamazaki D., Ikeshima, D., Tawatari, R., Yamaguchi, T., O’Loughlin, F., Neal, J.-C., Sampson, C.C., Kanae, S., and Bates, P.D. (2017). A high accuracy map of global terrain elevations. Geophysical Research Letters, 44: 5844-5853, DOI:10.1002/2017GL072874 |
| [7] | Copernicus Services Coordinated Interface / CSCI (2020). Copernicus DEM - Global and European Digital Elevation Model (COP-DEM). https://spacedata.copernicus.eu/web/cscda/dataset-details?articleId=394198 |
| [8] | Provost, F., Michéa, D., Malet J.-P., Boissier, E., Pointal, E., Stumpf, A., Pacini F., Doin M.-P., Lacroix, P., Proy, C., Bally, P. Terrain deformation measurements from optical satellite imagery: the MPIC-OPT processing services for geohazards monitoring. Remote Sensing of Environment.Volume 274, 2022, 112949, ISSN 0034-4257, https://doi.org/10.1016/j.rse.2022.112949. |
